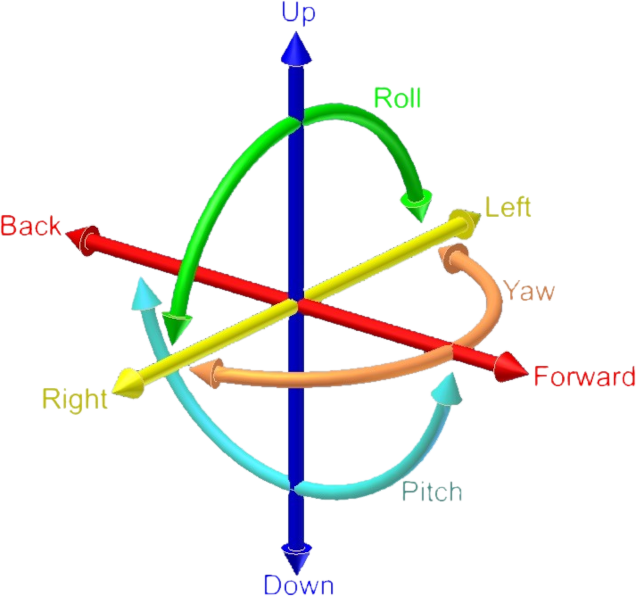
Yaw-boresighting inclinometers
Boresighting of roll and pitch is usually trivial, as one can simply subtract the current values of roll and pitch of the structure from the ones observed from the sensor. This is referred to as C-O boresighting. Usually, for small structures, the structure is put on a level plate, so the roll and pitch of the structure are 0. This way, the roll and pitch boresights are simply the readings given by the sensor. The approach given in this application note assumes that the structure is put on a level plate. It is not possible to directly calculate the boresight in the yaw direction, as an inclinometer has no yaw output. However, by tilting the structure the sensor is installed on around either the roll or pitch axis, the yaw boresight can be found. If the sensor is tilted around the pitch-axis, the yaw boresight can then be calculated using the following formula:
\[\psi = \arctan \left( {cos(\theta)sin(\phi)} \over sin(\theta) \right) \]
If the sensor is rotated around the roll axis, the formula is:
\[\psi = -\arctan \left( sin(\theta) \over {cos(\theta)sin(\phi)} \right) \]
Where \(\theta \) is the pitch reading from the sensor, \(\phi \) is the roll reading from the sensor, and \(\psi \) is the yaw boresight.
The structure should tilted as much as possible around either the pitch or the roll axis to get sufficient observability of the yaw boresight (a minimum of 10 degrees). It is important that it is only in one of the axes that the sensor is tilted, as any rotation around the other axis will directly result in a yaw-boresight estimation error.
However, this approach is only feasible when the sensor is mounted to a structure of a manageable size. In the case of large structures, the offset in yaw will usually have to be surveyed by other means.
To avoid the implications of yaw offsets ruining measurements, the Microrad and Millirad inclinometers include precision dowel holes, which allows mounting both the sensors with virtually no yaw offset. This greatly simplifies the process of aligning and mounting the inclinometers.
Get in contact to know more about our inclinometers.